Project Case of Synchronous Lifting – Teaching building rotated and translated by 61m
Project Case of Synchronous Lifting – Teaching building rotated and translated by 61m
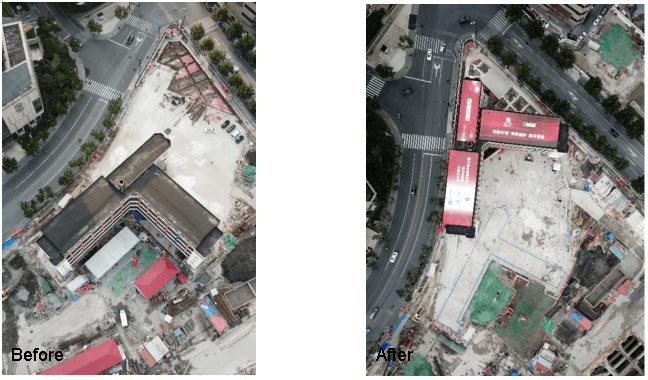
Ecole Primaire de Lagrené in Shanghai, China is a protected building in the 1930s. The structure is relatively weak and large in size, with uneven distribution of load and rigidity and flexibility of the main structural steel. Aiming at this special project, a new generation of shifting equipment – building shifting alternating walking robot, under the control of PLC, realizes continuous suspension, precise walking and arbitrary rotation during the pushing process of objects. It not only solves the technical problems that the construction technical standards for the flatness of the top surface of the rotating raft are high, and the deviation of the rotation and translation angle of such a large object is difficult to control, but also improves the safety and accuracy in the process of rotation and translation, and accelerates the progress of the project. It also greatly reduces the number and labor intensity of operating workers and saves a lot of turnover materials.
The traditional scheme of the overall displacement of the building
The overall displacement of the building is to move the building from the original position to the new position under the premise of ensuring the safety and integrity of the main structure of the building, including translation, lifting, rotation, etc.
The translation or rotation of the building usually adopts the method of pushing or pulling with a hydraulic jack. Regardless of whether it is pushed or pulled, a pulling point needs to be made on the building, and a reaction force support point needs to be set for the hydraulic cylinder. If it involves rotating construction, the reaction force support point has great difficulties in the design and construction, and there is the phenomenon of collapse of the roof during the translation or rotation process, and the safety and construction efficiency are low. In addition, it is necessary to solve the increasingly large-scale building displacement projects, the steering problem of the displacement process, and so on. In the above situation, there are many hidden safety hazards in the construction process: the construction efficiency is low, and the construction cost is high.
Under this background, the research and development of building shifting alternating walking robot is carried out, in order to use PLC overall synchronous shifting control technology and the upgrading of shifting device to solve the problems of overall synchronous jacking and underpinning, uneven settlement, precise positioning, and no track direction adjustment of large-area houses during the displacement process (Including building translation and rotation, and it can also improve construction efficiency and reduce construction costs.
Technical Points of Alternating Walking Robot
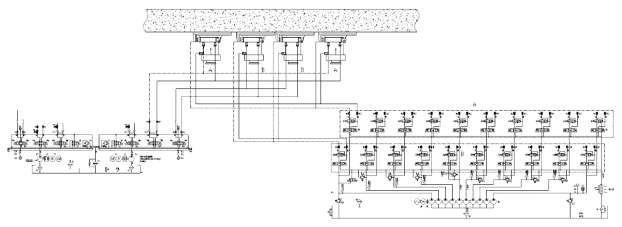
The building shifting walking robot is composed of a PLC synchronous jacking suspension system, asynchronous jacking control system and a shifting device. Both systems must complete unified control operations through the same console.
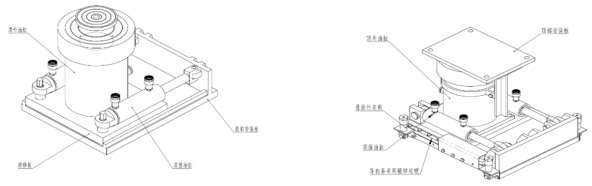
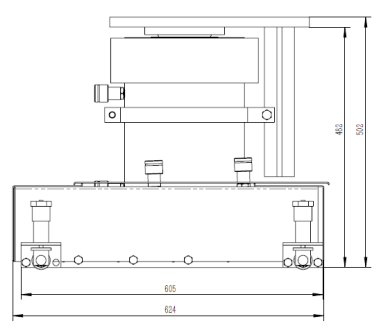
Alternate ejector is composed of jacking cylinder, thrust cylinder, sliding plate, bottom mounting plate, etc. It mainly meets the two functions of vertical jacking suspension and horizontal pushing. The jacking cylinder is placed on the sliding plate and is connected with the bottom of the sliding plate by screws. An MGE sliding plate is installed at the bottom of the sliding plate, which is placed at the bottom of the sliding plate. A mirror stainless steel plate is placed on the lower bottom plate, and the working friction pairs are MGE sliding plate and mirror stainless steel plate, and the dynamic and static friction coefficients are both 0.05. In practical work, considering the safety factor, the thrust cylinder is designed according to the friction coefficient of 0.1. One end of the thrust cylinder is fixed on the sliding plate through a pin shaft, and the other end is connected with the bottom mounting plate through a hinged connection. When the thrust cylinder is extended, the sliding plate and the jacking cylinder will be driven to move together through the pin shaft, so as to achieve the purpose of jacking and sliding.
Technical parameters: jacking force 200T, jacking stroke 140mm, jacking thrust 20T, jacking trust stroke 150mm, overall dimensions 600*460*470mm (length*width*height).
- Technical indicators. First, the building area for translation and jacking has been increased to more than 20,000m2. The second is to increase the number of control points to more than 150. The third is to increase the jacking speed to 1-2m/h. Fourth, there is no track direction adjustment.
- Advantages of the system. The first is to accurately realize the curve push, the frequency conversion control multi-point push, to realize the curve push of the whole equipment, the speed of each push track is controllable, and the position is controllable. Second, the push position is flexible. This step walker can realize the stop and push of the jacking device at any position, and is not affected by the stroke of the oil cylinder. During the pushing process, it is no longer necessary to make a reaction back, the pushing efficiency is high, and the process can be precisely controlled. The jacking process does not require a track. The third is that the track does not need to be guided during the jacking process, saving construction personnel and related management. Two groups of AB jacks make the jacking and suspension safer.
Project Status
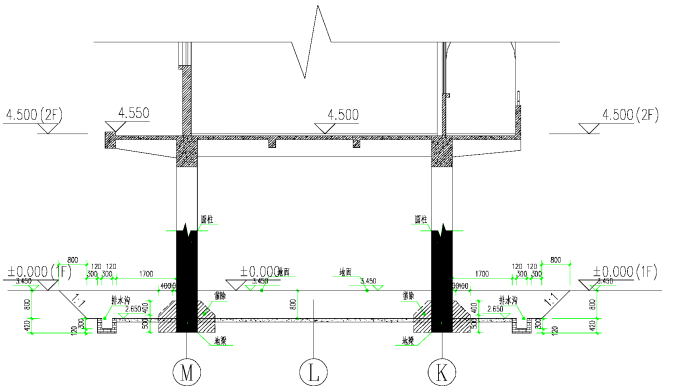
Ecole Primaire de Lagrené in Shanghai, China is a T-shaped building built in 1935 and is now a cultural relic protection site. The total width of the building is about 42m and the total depth is about 62m. The west section is arranged in an east-west direction, with three classrooms on the south side and an office on the north side, with a depth of about 7m and a width of the outer corridor of 2.7m. The east section is arranged in a north-south direction. There are three classrooms with a depth of about 7m and a width of the outer corridor of about 2.8m. The overall layout is T-shaped. According to the plan, Ecole Primaire de Lagrené will be rotated and translated 61m to the northwest.


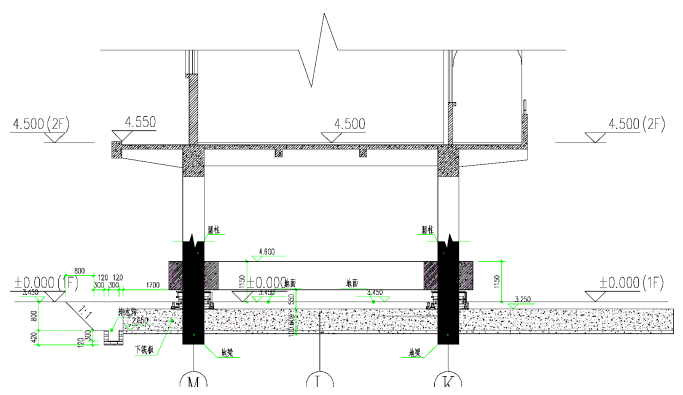
The foundation under the column of Ecole Primaire de Lagrené is an independent cap, and foundation beams are arranged longitudinally between the caps. The measured flat dimensions of the bearing platform are 400mm×1600mm and 400mm×1790mm, the foundation thickness is 900mm, and the buried depth is -1.2m or -1.16m. The foundation beam is set longitudinally on the platform, and the measured beam section is 350mm×900mm and 600mm×900mm. The foundation is reinforced with wood piles, and the measured diameter of the wood piles is 200mm to 300mm.
Project construction process
1 Remove indoor and outdoor non-protected walls, excavate indoor and outdoor earthwork, and pour C15 cushion; and set up drainage ditches, water collection wells and other measures around the house.
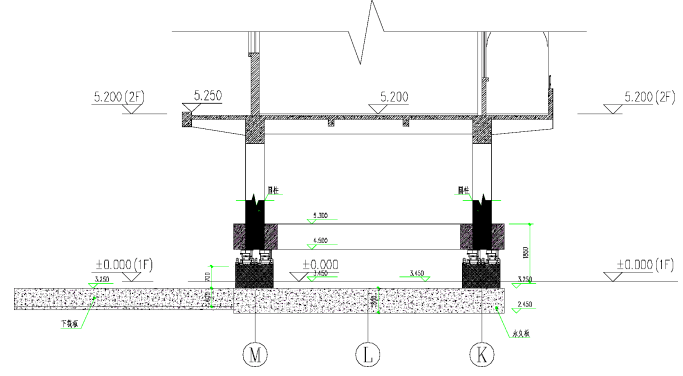
2 Parts of the indoor ground beams are cut off in blocks, and the indoor and outdoor C30 concrete rotating rafts are poured.
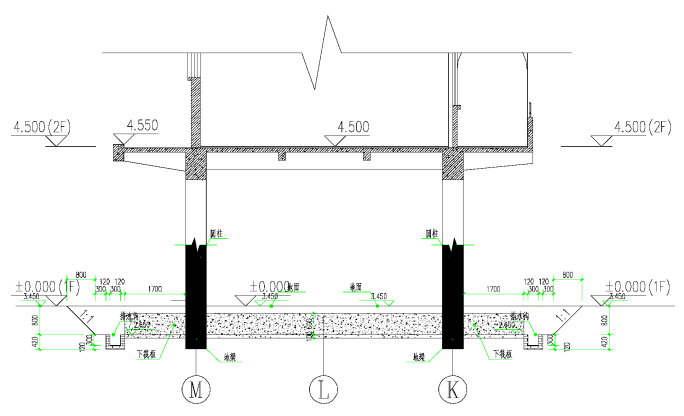
3 Pour the upper pallet beam.
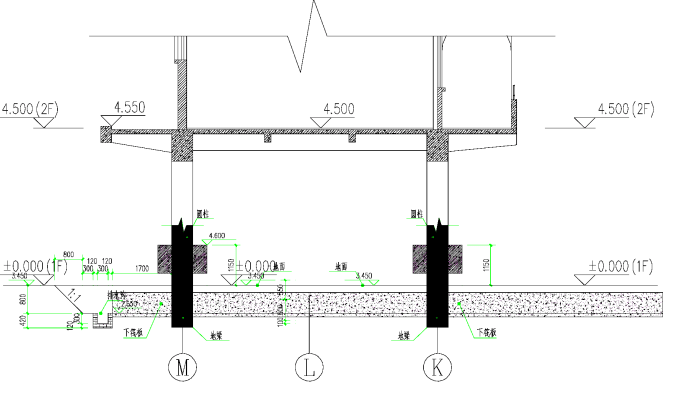
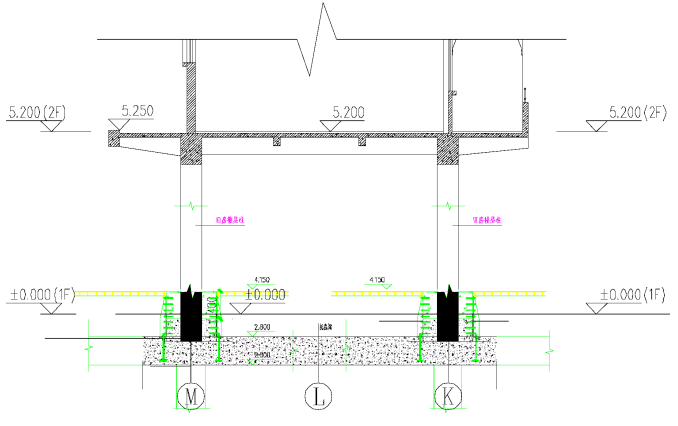
4 Install the walking device and use the PLC synchronous control device to rotate and translate 61.571m as a whole.
5 The overall jacking of the new site is 0.7m.
6 Connect the foundation and remove the equipment.
lift translation
A total of 55 jacking points, 220 hydraulic cylinders and 220 step walker are set up in this project. The translation adopts PLC shift computer control technology to precisely control the ejection displacement of each ejection point. Through the feedback displacement signal, the jacking force of each point is automatically and accurately adjusted to ensure the dynamic balance between the jacking force and the frictional resistance. The control accuracy is controlled within 2mm to ensure that the linear and spatial deformation of the building changes within the elastic range.
According to the distribution of the force-bearing columns of the components, and considering the requirement of uniform distribution of force, the project adopts an integral rotating raft for rotation and translation construction, and uses a building shifting alternating walking robot for shifting.
The PLC Synchronous Lifting System, the synchronous jacking control system and the shifting device are combined to form a building shifting alternating walking robot. The PLC synchronous jacking suspension hydraulic system adopts a 110-point alternate jacking suspension system, and the PLC synchronous jacking control system adopts a 13-point alternate jacking system. The two systems must complete the unified control operation through the same console.
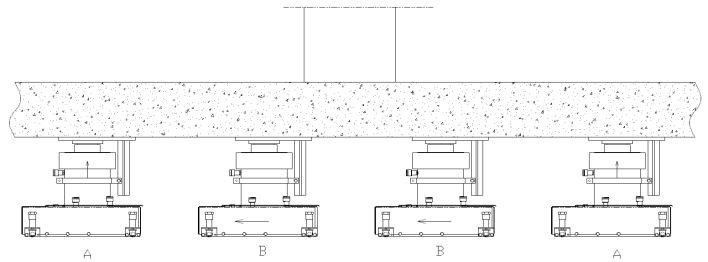
Working steps diagram
1
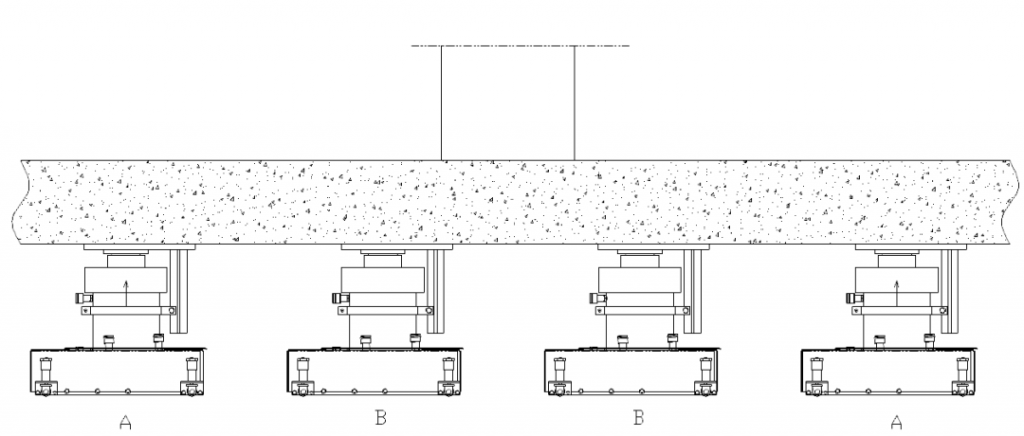
2
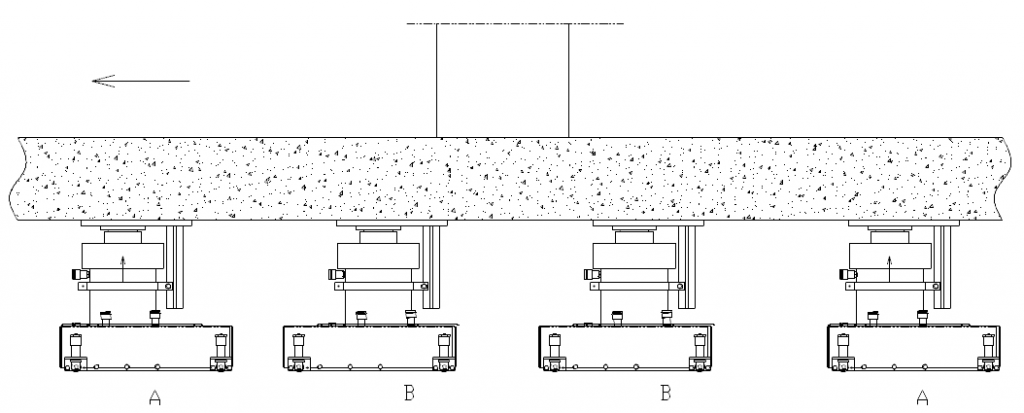
3
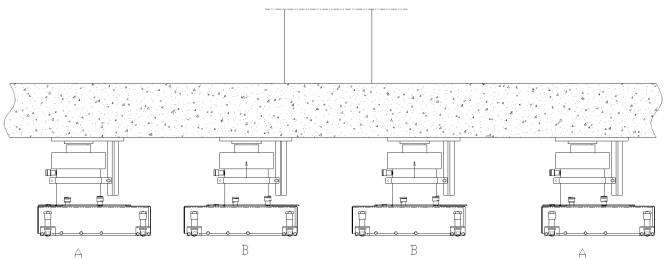
4
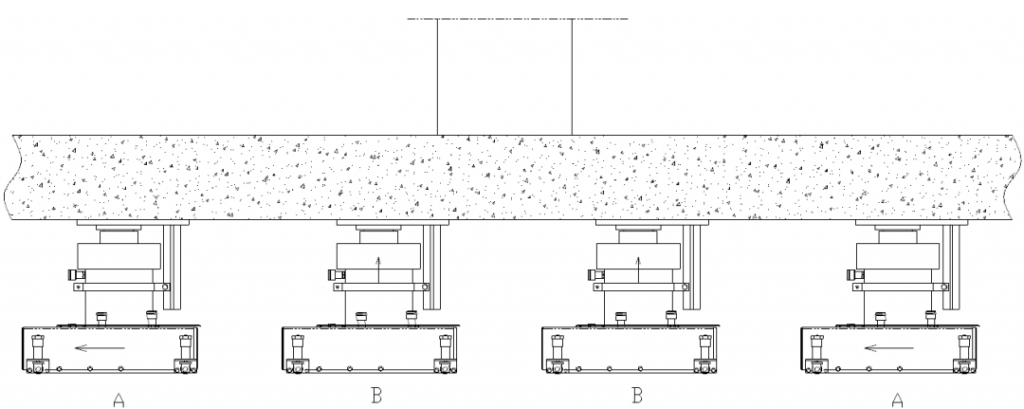
5
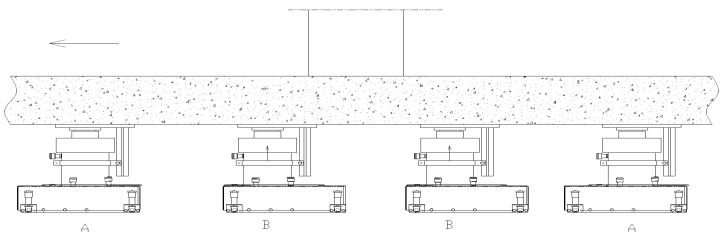
6
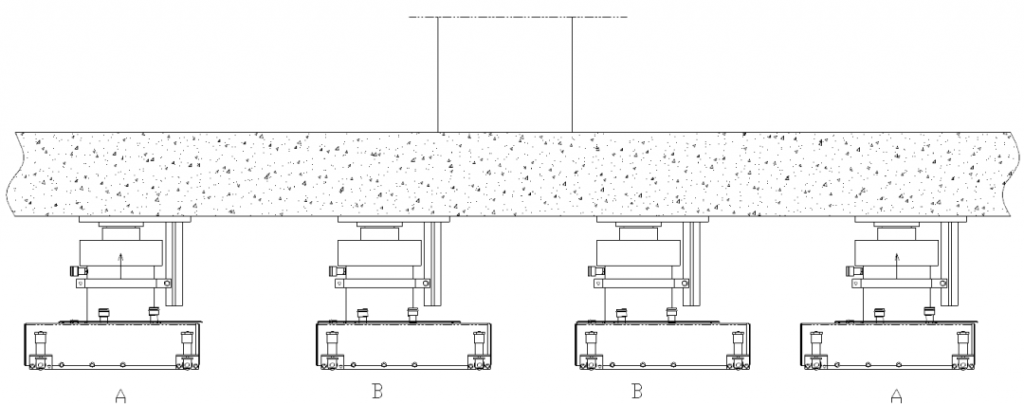
7
Summarize
This project is a rotational translation of a massive building, and the virtual center of rotation is outside the building. For the possible radial deviation along the rotation center, the walking translation equipment can achieve the deviation correction effect by adjusting the translation and pushing direction. At the same time, two limit beams are preset, and the two-way safety measures ensure that the translation is in place accurately. When the maximum radial cumulative deviation of the building is found to be greater than 50mm during the rotation and translation process, the deviation correction effect can be achieved by adjusting the application angle of the top force of the stepping walker to ensure that the deviation is corrected within ±5mm before the in-place connection.
The construction displacement robot combining the PLC synchronous hydraulic control system and the alternating step walker is used to precisely control the jacking displacement of each jacking point. Through the feedback displacement signal, the jacking force of each point is automatically and accurately adjusted to ensure the dynamic balance between the jacking force and the frictional resistance. The control accuracy is controlled within 2mm to ensure that the linear and spatial deformation of the building changes within the elastic range, and finally the building can be accurately rotated and kept flat on the raft to reach the designed and planned position.
Torcstark’s PLC hydraulic synchronous jacking system can fully realize the rotation, jacking and translation of large buildings. It not only improves the safety and accuracy in the process of rotation and translation, and accelerates the progress of the project, but also greatly reduces the number and labor intensity of operators, and saves a lot of turnover materials. If you have any needs, please contact us, Torcstark will offer you the most perfect solution.